随着智能交通与自动驾驶技术的飞速发展,对高精度、高鲜度、高细节的道路地图需求日益迫切。传统地图测绘方式成本高、更新慢,难以满足动态变化的城市路网。在此背景下,由武汉大学唐炉亮教授团队引领的“基于时空大数据的车道级精细道路众包测图技术”,正成为学术研究与产业应用的前沿热点。该技术深度融合了计算机科学与测绘科学,其核心在于通过海量、异构的众包时空数据,实现道路几何、拓扑、属性(如车道线、交通标志)的精细化、自动化提取与动态更新,而这离不开一系列软硬件技术的协同开发与创新。
一、 技术核心:众包数据驱动的精细建模
该技术的基石是“众包”理念。数据来源不再是专业测绘车辆,而是广泛分布的普通车辆、智能手机、网约车、物流车等搭载的GNSS、IMU、摄像头、激光雷达(部分)等传感器。这些设备在移动过程中持续产生海量的轨迹、图像、点云等时空大数据。关键技术挑战在于如何从这些低成本、非专业、质量参差不齐的数据中,“淘洗”出高精度的车道级道路信息。
唐炉亮教授团队的研究重点包括:
- 多源轨迹数据融合与增强定位:通过多车轨迹协同处理、路网约束平差等方法,显著提升众包GNSS轨迹的绝对与相对精度,为车道识别奠定几何基础。
- 车道几何与拓扑自动提取:利用高密度轨迹点云的分布模式,通过聚类、拟合、模式识别等算法,自动生成车道中心线、边界线,并建立车道之间的连接关系(拓扑)。
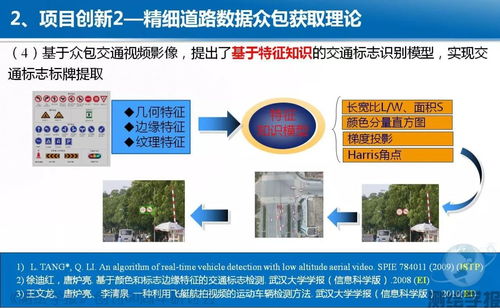
- 道路属性智能识别:结合众包车载图像,利用深度学习(如卷积神经网络CNN)自动检测和识别车道线类型(实线/虚线)、交通标志、路标等语义信息,并与几何模型进行关联。
- 地图动态增量更新:设计高效的时空数据索引和变化检测算法,能够快速发现道路的新建、改建、封闭等变化,实现地图的“活”更新。
二、 计算机软件技术的深度开发
实现上述算法,需要强大的软件技术栈作为支撑:
- 大数据处理平台:必须构建基于Hadoop、Spark等分布式计算框架的数据处理流水线,以应对TB/PB级的原始数据清洗、存储与批量计算。
- 流式计算与实时处理:对于需要近实时更新的场景,需引入Flink、Kafka等流处理技术,对数据进行在线滤波、融合和事件检测。
- 高性能计算与算法优化:点云处理、图像识别、大规模图(拓扑)计算等都是计算密集型任务。需要利用GPU并行计算、优化算法复杂度(如使用高效的索引结构R-tree、空间哈希),并在C++/CUDA等层面进行性能调优。
- 人工智能与机器学习框架:广泛依赖TensorFlow、PyTorch等框架进行深度学习模型的训练与部署,用于图像语义分割、目标检测等任务。无监督/半监督学习用于从无标签数据中自动学习模式。
- 地图数据管理与服务引擎:设计专用的地图数据模型(兼顾几何、拓扑、属性、时间维度),开发高效的数据压缩、传输和渲染引擎,以支持终端(如自动驾驶汽车)的快速查询与调用。
三、 专用硬件与边缘计算的协同创新
仅有软件还不够,硬件是数据获取与处理的物理基础,其发展趋势是向着更集成、更智能、更边缘化演进:
- 低成本高性能传感器组合:推动消费级高精度GNSS模块、低成本固态激光雷达(LiDAR)、多目摄像头、高精度IMU的普及与融合,降低众包数据采集门槛。
- 车规级边缘计算单元:在数据源头(车辆端)集成强大的边缘计算设备(如基于NVIDIA Orin、华为MDC等芯片的平台),实现原始数据的本地预处理(如图像特征提取、点云精简、轨迹滤波),仅将有效特征或轻量化数据上传至云端,极大减轻通信与云端压力,并保护数据隐私。
- 定制的数据采集硬件:为特定众包车队(如出租车、物流车)设计即插即用的“数据采集黑盒”,集成所需传感器与通信模块,实现标准化、规模化的数据收集。
- 云端高性能计算集群:云端需要配备强大的CPU/GPU服务器集群,用于执行离线的全局优化、模型训练、地图融合与发布等重型计算任务。
四、 挑战与未来展望
尽管前景广阔,该技术仍面临多重挑战:数据质量与一致性控制、复杂场景(如路口、立交)的精确建模、众包参与者的隐私保护与激励机制、软硬件系统的标准化与成本控制等。
该技术的发展将与自动驾驶、智慧城市深度绑定。软硬件技术的开发将更加一体化,形成“智能传感器-边缘计算-云端大脑”协同的闭环系统。随着5G/6G通信提供的高带宽低延迟,以及AI芯片算力的持续提升,车道级众包测图将实现从“准静态更新”到“实时感知与构建”的飞跃,最终为全自动驾驶提供一张实时、可靠、精细的“数字道路底座”。唐炉亮教授团队的工作,正是推动这一未来图景成为现实的关键学术与工程力量。